Analysis and Design of Cognitive Radio Networks Using Game Theory
|
Analysis and Design of Cognitive Radio Networks Using Game Theory |
||
Decision Rule Classes
1-Best Response Dynamic
 |
2- Better Response Dynamic
 |
3- Random Better Response Dynamic(a)
 |
4- Friedman’s Random Better Response(b)
 |
Stage Game Properties
Improvement Path Terminology
1- Path
 |
2- Improvement Path
 |
3- Finite Improvement Property
 |
Theorem : Improvement Cycles and FIP
 |
Example :Improvement Paths in the Prisoners’ Dilemma
Consider the 2x2 game shown in matrix representation in Figure 4.5. A complete listing of the improvement paths for this game is given in Table 4.1.
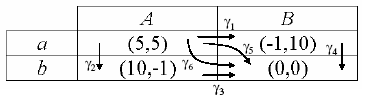 |
| figure 4.5 : Prisoners’ Dilemma Game Matrix for Improvement Path Analysis |
Table 4.1 : Improvement aths for Game Presented in Figure 4.1 |
 |
4- Weak Finite Improvement Property (weak FIP)
 |
Theorem : FIP and NE existence
All games with FIP have at least one Nash equilibrium. |
Convergence Properties
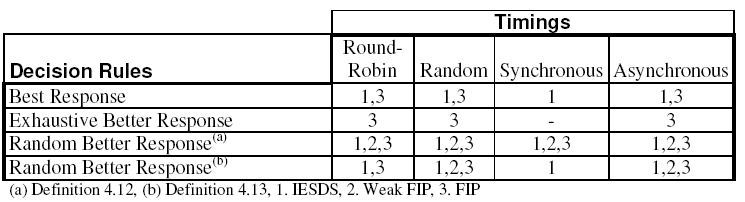
The criteria for assured convergence for the classes of games, decision rules, and decision
timings are summarized in Table 4.2. Note that the broadest convergence conditions
hold under random and asynchronous timings and for the random better response rules.
This implies two important results for myopic cognitive radio network design. First,
cognitive radio networks should in general be designed so decision timings are
randomized instead of synchronized – a good thing as synchronized algorithms generally
do not scale as well as randomized algorithms due to the increased overhead inherent in
the synchronization process. In general, the decision engines in cognitive radios should
support decision rules that satisfy the class of decision rules of Definition 4.12 as that rule
supports the broadest range of convergence conditions. However, it should be noted that
when any of the other classes of decision rules converge, it should be possible to design
algorithms that converge faster than the class of decision rules of Definition 4.12. This
design suggestion appears to be reasonable as Virginia Tech has built a cognitive radio
whose decision engine implements a decision process in this class of algorithms
[Rondeau_04].
Table 4.2 : Convergence Criteria |
 |
 |